将3D坐标投影到具有已知点的2D图像上
我正在编写一个.NET程序,允许用户通过识别图像上的特定点来注册图像,然后指定与每个点相关联的真实世界坐标。
http://www.ironbyte.ca/temp/mountain.jpg
{kind=link}
图像注册过程还要求用户指定相机的坐标。
注册图像后我想要做的就是根据实际坐标在图像上绘制其他点。
我已经完成了很多关于观点预测的阅读,但我正在努力让事情发挥作用。我必须承认,我的数学技能不是他们应该成为斗争的一部分。我遇到的问题是试图确定焦距和显示器表面的距离:
在本文中称为查看者的位置(e [x,y,z]):http://en.wikipedia.org/wiki/3D_projection#Perspective_projection
我也一直在提到这篇文章: http://www.shotlink.com/Tour/WebTemplate/shotlinknew.nsf/2c47cc31e412bc4985256e6e00287832/c1743b40acf6aa03852575b7007122b0/$FILE/Plotting%203D%20ShotLink%20Data%20on%202D%20Images.pdf 它从视野中提取焦距,这似乎是事先知道的,但不是我的情况。
所以我想我的问题是,有没有办法可以反过来根据我图像上已知点的位置来确定焦距和/或视野?或者我是以错误的方式看待这一点,也许有一种更简单的方法来实现最终目标?
2 个答案:
答案 0 :(得分:0)
编辑: 我对模式中的混合单元感到困惑。我因此重新做了一些答案。
如果我们看一下投影背后的数学,那对我来说听起来是可行的。
这是水平坐标的情况不太严格的模式(我混合现实世界坐标和像素一来试图说明你的情况):
使用:
-
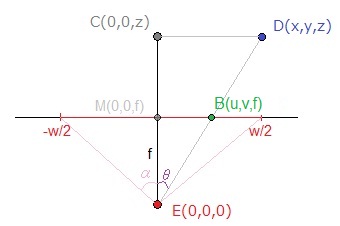
D,用户给出的一个点,(x,y,z)其投影位置与相机定义的相对坐标系相关(因此在应用其平移和旋转后) -
E摄像机点 - 上述坐标系的原点。 -
B图片平面中的结果点,以u和v为单位。图片平面的尺寸为wxh像素。 -
f焦距(与,以像素为单位< / em>,x相同的单位,y,z...)F它在真实世界单元中的值,α水平半角视图 - 您要评估的值
您可以看到三角形 ECD 和 EBM 类似,因此使用Side-Splitter Theorem,我们得到:
-
EM / EC = MB / CD&lt; =&gt;f / z = u / x(我们正在比较比率,所以如果等式的左边成员使用真实世界单位而右边的成员使用像素,则没有问题是真实世界值除以像素)
我们得到:
-
f = u / x * z
现在,如果你想要 α F ,我想你需要知道尺寸r_x x {{ 1}}(真实世界单位)相机的传感器,因为:
-
r_ytan(α) = (r_x / 2) / f
但至于F = r_x / (w / 2) * f,你可以通过:
-
α
如果你想与你所指出的维基百科文章并行,我们一直在使用:

其中:
-
tan(α) = (w / 2) / f=(d_x,d_y,d_z),相机系统中该点的位置 -
(x,y,z)=(s_x,s_y),可打印表面的大小 -
(w,h)=(r_x,r_y,r_z),记录表面的特征 -
(r_x,r_y,f)=(b_x,b_y),在您的可打印表面上的位置
答案 1 :(得分:0)
我能够使用Tsai算法(http://en.wikipedia.org/wiki/Camera_resectioning#Algorithms)的实现来解决这个问题,该算法可以使用最少4个已知点来计算投影矩阵。基本上,我允许用户指定点的世界坐标,然后单击图像以指定图像坐标。该算法使用这些映射(映射越多,解决方案越准确),以及图像宽度和高度来计算投影矩阵。然后可以使用该投影矩阵使用世界坐标将附加点投影到图像上。
- 我写了这段代码,但我无法理解我的错误
- 我无法从一个代码实例的列表中删除 None 值,但我可以在另一个实例中。为什么它适用于一个细分市场而不适用于另一个细分市场?
- 是否有可能使 loadstring 不可能等于打印?卢阿
- java中的random.expovariate()
- Appscript 通过会议在 Google 日历中发送电子邮件和创建活动
- 为什么我的 Onclick 箭头功能在 React 中不起作用?
- 在此代码中是否有使用“this”的替代方法?
- 在 SQL Server 和 PostgreSQL 上查询,我如何从第一个表获得第二个表的可视化
- 每千个数字得到
- 更新了城市边界 KML 文件的来源?