жҲ‘дҪҝз”ЁKinect SDKйҖҡиҝҮKinect V2жҚ•иҺ·дәҶдёҖз»„е·Ідҝқеӯҳзҡ„ж•°жҚ®гҖӮж•°жҚ®йҮҮз”ЁRGBеӣҫеғҸпјҢж·ұеәҰеӣҫеғҸе’ҢеҪ©иүІзӮ№дә‘зҡ„еҪўејҸгҖӮжҲ‘дёәжӯӨдҪҝз”ЁдәҶCпјғгҖӮ
зҺ°еңЁжҲ‘жғід»…дҪҝз”Ёдҝқеӯҳзҡ„йўңиүІе’Ңж·ұеәҰеӣҫеғҸеҲҶеҲ«еҲӣе»әзӮ№дә‘пјҢдҪҶжҳҜеңЁMatlabдёӯгҖӮ
pcfromkinect MatlabеҮҪж•°йңҖиҰҒдёҖдёӘе®һж—¶KinectгҖӮдҪҶжҲ‘жғіз”ҹжҲҗжІЎжңүиҝһжҺҘKinectзҡ„зӮ№дә‘гҖӮ
иҜ·зҹҘйҒ“гҖӮ
жҲ‘еҸ‘зҺ°дәҶд»ҘдёӢзӣёе…ій—®йўҳпјҢдҪҶжІЎжңүдёҖдёӘжңүжҳҺзЎ®зҡ„зәҝзҙўгҖӮ
зӯ”жЎҲ 0 :(еҫ—еҲҶпјҡ2)
жҲ‘дёәжҲ‘зҡ„з”іиҜ·еҒҡдәҶеҗҢж ·зҡ„дәӢжғ…гҖӮжүҖд»ҘиҝҷйҮҢз®ҖиҰҒжҰӮиҝ°дәҶжҲ‘жүҖеҒҡзҡ„пјҡ
дҝқеӯҳж•°жҚ®пјҲCпјғ/ Kinect SDKпјүпјҡ
еҰӮдҪ•дҝқеӯҳж·ұеәҰеӣҫзүҮпјҡ
MultiSourceFrame mSF = (MultiSourceFrame)reference;
var frame = mSF.DepthFrameReference.AcquireFrame();
if (frame != null )
{
using (KinectBuffer depthBuffer = frame.LockImageBuffer())
{
Marshal.Copy(depthBuffer.UnderlyingBuffer, targetBuffer,0, DEPTH_IMAGESIZE);
}
frame.Dispose();
}
е°Ҷзј“еҶІеҢәеҶҷе…Ҙж–Ү件пјҡ
File.WriteAllBytes(filePath + fileName, targetBuffer.Buffer);
дёәдәҶеҝ«йҖҹзңҒй’ұпјҢжғіжғідёҖдёӢзҺҜеҪўзј“еҶІгҖӮ
иҜ»еҸ–ж•°жҚ®пјҲMatlabпјү
еҰӮдҪ•иҺ·еҸ–z_dataпјҡ
fid = fopen(fileNameImage,'r');
img= fread(fid[IMAGE_WIDTH*IMAGE_HEIGHT,1],'uint16');
fclose(fid);
img= reshape(img,IMAGE_WIDTH,MAGE_HEIGHT);
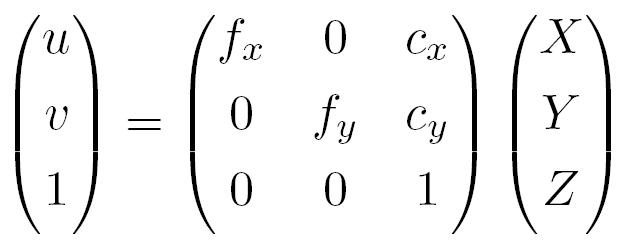
еҰӮдҪ•иҺ·еҸ–XYZж•°жҚ®пјҡ
дёәжӯӨпјҢиҖғиҷ‘е°Ҷuvеқҗж ҮиҪ¬жҚўдёәxyzзҡ„й’Ҳеӯ”жЁЎеһӢе…¬ејҸ пјҲformulaпјүгҖӮ
иҰҒиҺ·еҸ–cameramatrix KпјҢжӮЁйңҖиҰҒж ЎеҮҶзӣёжңәпјҲmatlab calibration appпјүжҲ–д»ҺKinect-SDKпјҲvar cI= kinectSensor.CoordinateMapper.GetDepthCameraIntrinsics();пјүиҺ·еҸ–зӣёжңәеҸӮж•°гҖӮ
coordinateMapper пјҡ
зӣҙжҺҘд»ҺKinect SDKиҺ·еҸ–XYZзҡ„ж–№жі•йқһеёёз®ҖеҚ•гҖӮдёәжӯӨпјҢlinkеҸҜд»Ҙеё®еҠ©дҪ гҖӮеҸӘйңҖйҖҡиҝҮkinect sdkиҺ·еҸ–зј“еҶІеҢәпјҢ并е°ҶеёҰжңүcoordinateMapperзҡ„rawDataиҪ¬жҚўдёәxyzгҖӮ然еҗҺе°Ҷе…¶дҝқеӯҳеҲ°csvжҲ–txtпјҢиҝҷж ·дҫҝдәҺеңЁmatlabдёӯйҳ…иҜ»гҖӮ
{kind=link}